研究内容
誰もが安心・安全に過ごせる社会の実現に向けて
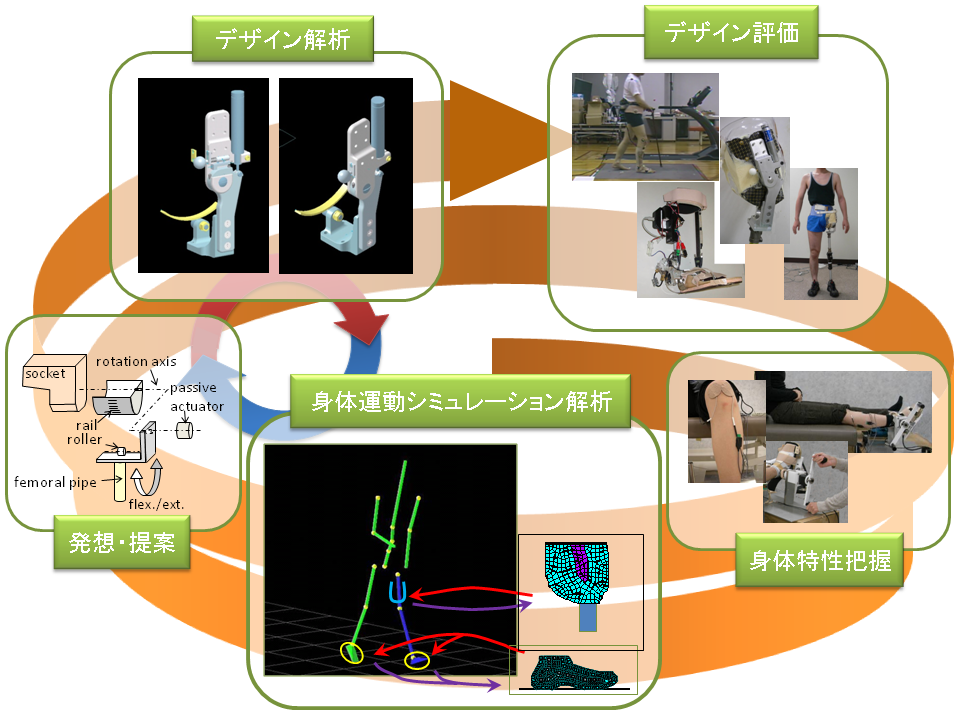
本研究では、下肢切断者の方の運動能力を大きく向上させることができる高機能なロボット股義足の開発を行っています。具体的には、股・膝・足の関節を動力化した部品(ハードウェア)とそれらを連動させて適切に動かす技術(ソフトウェア)の開発と、それらを組み合わせた股義足の開発を同時並行的に進めています。使用者の思い通りに動作する股義足を実用化できれば,日常生活の負担を大幅に減らし、さらにはこれまでは「できなかったこと」(たとえばスムーズな階段昇降や坂道歩行など)が「普通にできること」になることで、下肢切断者の活動や参加機会が格段に拡大することが期待されます。